High School Fusor: Fusor 0 Current Metering and Fusor 1 Parts Ordered
This last week has been a big one for my fusion project.
Firstly, I repaired Fusor 0 and got it working better than when it was first built! I have also made some very interesting voltage and (finally) current measurements that have given me a much better understanding of the plasma created in the demo system.
This research will soon feed into Fusor 1, as I have finally ordered the rest of what I will need to build it. These components should all arrive my mid-October at the latest (I had to have some components custom machined) which is convenient as my fall break occurs in mid-October and I might be able to get some work done without things like school and furthering my (real) education getting in the way.
Beyond that, I have begun researching a number of more complex topics (which I will address in a subsequent post), such as “Ion Gun” Fusion,² that I hope to someday integrate into a fusor design. I have also been experimenting with remote monitoring and control of Fusor 1 using either Arduino or Raspberry Pi based systems (¿por qué no los dos?). Additionally, I will soon be able to move my workshop/lab into a new, larger space that will make construction of Fusor 1 much easier.
Fusor 0:
Rebuild:
Despite all of the progress with Fusor 1, I am still experimenting and learning many new things with Fusor 0.
After accidentally melting the grid on 0.3, I had to take the chamber apart again to replace the grid and clean the top plate. While disassembly and cleaning of the chamber went smoothly (I have gotten significantly more efficient at this), I had significant trouble making a new grid.
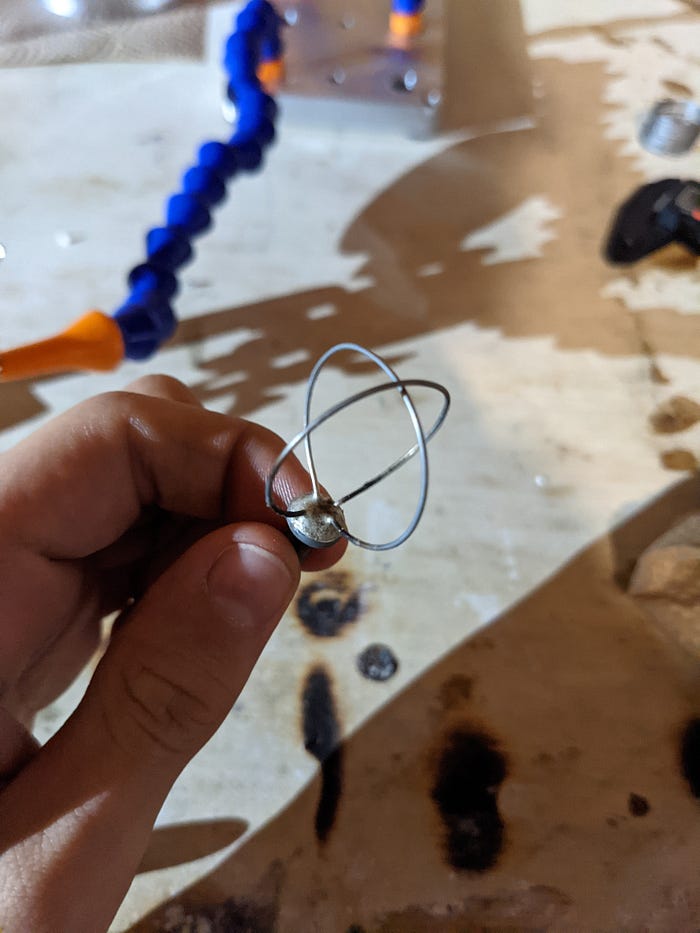
As the grid top was too close to the top plate in Demo 0.3, the bottom of the new grid’s loops would have to sit closer to the ceramic feed-through instead of protruding upwards as they did in the 0.3 grid.

Having decided this, I devised a new grid design that would place the bottoms of the steel loops almost as close to the screw as possible. This new design incorporated small tabs at the bottom of the grid loops that sat inside of the grooves of the feed-through screw. While these tabs made the grid sit much closer to the screw, they also made it significantly harder to build.


I could make the tabbed loops relatively easily, I just could not figure out how to hold the tabs within the grooves on the screw so that I could silver solder them in place. I tried using helping hands, pliers, hot glue, dowels, even oven mitts, but nothing worked. Eventually (I think by chance), I was able to get the grids and tabs aligned and from there it was just a simple matter of soldering them in place with silver solder.

Throughout this process, I somehow forgot that the 0.3 grid was not entirely screwed into the feed-through so I could have continued using the same (easy to make) grid design and just screwed it further into the alumina stalk. Despite taking many hours for no good reason, the grid 4 design is better aligned, so the time taken to design and build it was not a complete waste.
It is also worth noting that since I have switched to the single-solder-point of grids 2 and 4, I have noticed significantly reduced sputtering on the glass and plates. I am unsure if the smaller grid diameter, lack of many solder joints, or just better cleaning of the grid to remove flux made the difference.
Metering:
After rebuilding the vacuum chamber with the new grid, I next had to address a pronounced problem with Fusor 0 that had to be fixed before I could hope to build Fusor 1: metering. Without an adequate understanding of what was actually going on within the chamber, all evidence collected through Fusor 0 tests would be purely qualitative.
As Fusor 1 will absolutely require current and voltage metering anyway, I had already developed a design to measure both. With Fusor 0 existing as a low stakes test-bed for Fusor 1, it only made sense to apply the design to it before using an untested system on Fusor 1.

I measured voltage in the same way that I did in Fusor 0.3, by using a Fluke 80k-40 High Voltage Probe³ to measure the voltage going from the rectifier to the fusor grid. This probe can be thought of as a resistor chain voltage divider⁴ that reduces the voltage 1000:1 to be measured with the multi-meter. On fusor.net, the FAQs unilaterally suggest a different metering method using 100 megaohm resistors,⁵ ⁶ but from what I understand, an HV probe provides the same utility while being easier to implement.
The main improvement of version 0.4 was the addition of current metering. I used the sampling resistor method⁷ as it is the simplest way to indirectly measure current. Using a 10kOhm wire-wound resistor placed between the NST case and electrical ground,⁸ I measured current via a multi-meter with crimp-style test leads attached to the case and to ground. Because the NST transformer cores are grounded to the case,¹⁹ putting a resistor between the case and electrical ground allows measurement of the current output to the fusor grid.
Although the block diagram above does not show it, this system was also designed to be “star grounded,” in that all ground connections connect to ground via a common post in a star formation.⁹ ¹⁰


Testing:
I have done a total of three runs of Fusor 0.4 thus far. Each has been generally successful, in that no catastrophic failures have occurred.¹¹ However, there have been some interesting events that require further study, and now that I can reliably generate plasma my vacuum system has revealed itself to be much worse than I had initially expected.
The operating procedure used in these tests can be simplified to a few concise steps:
- Initial conditions: chamber at atmospheric pressure; all metering and recording devices activated; variac, vacuum pump, and ground wire connected to surge protector; surge protector switched off; vacuum pump switched off; variac switched off and dial set to 0; NST unplugged from variac
- Surge protector switched on and vacuum pump activated
- Vacuum pump left to run for five minutes (I think that the pump should be left to run longer before NST activation)
- NST plugged into variac
- Variac switched on and very slowly brought to full voltage or to whatever conditions are being tested
- System left to run until some condition is reached (if the grid begins to glow, however, deactivation procedures are immediately undertaken to preserve the grid)
- Variac gradually turned to zero voltage and switched off
- Surge protector switched off (Done before deactivating the pump with its dedicated switch. This is to prevent a mistake like the one that caused the 0.3 failure)
- All other devices deactivated
This procedure yielded the best plasma I have achieved yet.


The plasma in the 0.4 test is of significantly better “quality,” than the 0.1 plasma in that it is spread out within and around the grid instead of being located only around the grid itself (this is indicative of a more evenly charged chamber). While the power supply system was the same between tests (and power supplied can be assumed to be roughly equal), the girds were changed and the bottom flange flipped between 0.1 and 0.4, meaning that the 0.4 grid was about half of an inch higher up in the chamber. The vacuum pump was left on for only 152 seconds before the 0.1 picture was taken as opposed to the 431 seconds before the 0.4 image as well.
I think that the pump time was the largest factor that made the 0.4 plasma much better, as well as the metal cap on the second pump inlet, both of which combined to give the 0.4 run a deeper vacuum. This deeper vacuum combined with the smaller and better centered grid prevented arcing to ground which allowed plasma to form at a much higher volume, leading to better results as well. These better results from a deeper vacuum highlight the need for a more advanced vacuum system for later iterations of Fusor 1.
Results & Analysis:
Now that I have accurate voltage and current data, as well as a camera that doesn’t base its settings on an AI rolling dice (looking at you, Google Pixel), I can perform some limited analysis on my results.
The first Fusor 0.4 run used a Sparkfun VC830L digital multimeter¹² that I have had since forever to measure current. Although it was set to measure up to 2V DC across the resistor, as I turned the variac up from 39V AC to 52V AC, the multimeter “bottomed out” after reading 0.199V.


This issue was repeatable multiple times and always happened at approximately 50VAC from the variac. I switched the meter out for a much higher quality Fluke 117¹³ ¹⁴ for run 2 which did not experience the same issue. I do not know why the Sparkfun meter did not work and the Fluke meter did, but I suspect that it has something to do with the Sparkfun’s lack of input shielding making it unable to measure the potentially “dirty” DC from the transformer case. I have no idea what changed about the case of the NST as I turned the variac up or why that change occurred and am not yet sure how to measure it. I have not yet encountered any discussion of this sort of thing happening on fusor.net, but I plan on making a post asking for advice when I have more data.
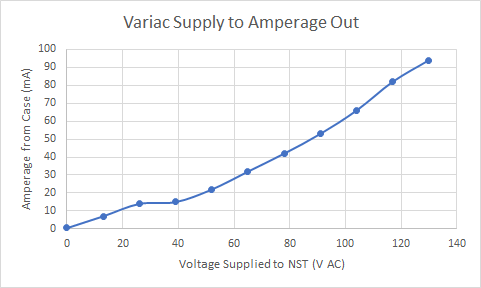
After switching the meters, I did a full run and collected the complete voltage and current data displayed below:
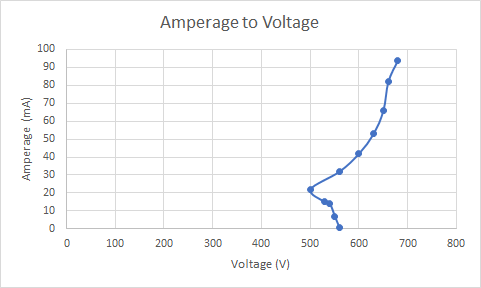
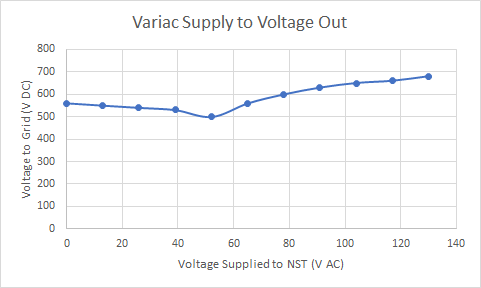
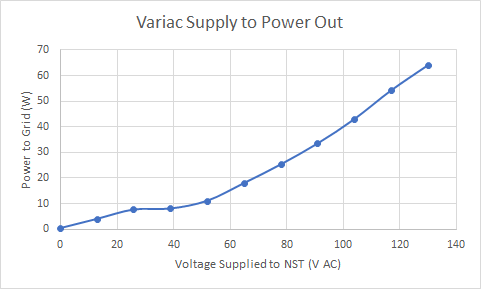
These results are not what I initially expected, but they do make sense. Firstly, the voltage measured is significantly lower than my NST’s advertised 12kV output, but that makes sense because of the NST’s magnetic shunt design¹⁵ and matches some of Richard Hull’s observations from 2002¹⁶ so I have no reason to believe that there is an issue there. Similarly with current: The short circuit current on the NST nameplate is 30mA but I measured current over three times this. While it seems like the current should stay below this point, there is nothing fundamental that I know of that requires this to be the case, and there is data on fusor.net to suggest that it is not, so I have no reason to believe that my measurements are wrong.
Interestingly, the point where the Sparkfun meter failed is the point where the variac supply to amperage out graph as changed in character. Between 0V and 25V supplied, the graph is roughly linear and likewise from 40V to 130V, both ranges with similar slopes. From 25V to 40V, the range in which the meter failed, the current stays constant. I do not yet know the significance of that information, but I suspect that the two events are correlated.
Electrical metering is only part of the data that I collected. I also recorded video of all runs that I can cross-reference against images on fusor.net¹⁷ to gain a very rough idea of the level of vacuum in the chamber.
The post that I will be comparing my images to contains a series of 9 images at varying pressure and voltage. I can compare my plasma results to those images to guess at what level of vacuum I have achieved. While my chamber design is somewhat different than the one seen below (mine uses a grounded plate design instead of an inner and outer grid, among other differences), the power supply system is almost identical, making comparing my pictures with these somewhat feasible.
Although my voltage and current are both very different from that in these images, the visual quality of my plasma seems similar to the 1 Torr image except for the polar bright spots and ”bugle jet” glow. This seems to imply that my chamber has not yet reached 1 Torr of pressure, which is unfortunate as I will need a pump that can attain a pressure of at most 30 milliTorr for fusion.¹⁸ Granted, some of the pressure in my chamber could be caused by leaks, but regardless this confirms that I will eventually need a new pump.
Planned Upgrades:
As I just ordered the rest of the Fusor 1 parts and will soon begin assembly, I am not going to invest a significant amount of time or money into Fusor 0 anymore. With that said, I am going to make a few upgrades:
- I will use the Sparkfun meter to measure the AC voltage from the variac into the NST as right now I am relying on the dial at the top of the Variac and have some worries about its accuracy. Should the output be wildly different from the dial, I will convert the data collected from the tests done so far to the new variac output values.
- I will update my operating procedures to let the pump run twice as long (10 minutes) before activation. I do not know if this will change anything about the vacuum levels reached, but it is worth trying. If letting the pump run longer improves the vacuum (determined by comparison with the fusor.net images), I will allow the pump to run for longer intervals to determine how far that improvement goes.
Fusor 1:
Design:
When I made my first post, my latest Fusor 1 design (the third version) was almost comprehensive enough to build, but there were still a few flaws and unknowns. I addressed those issues in design iterations four and five, the latter of which I have ordered the necessary parts for and will begin construction on when they arrive.
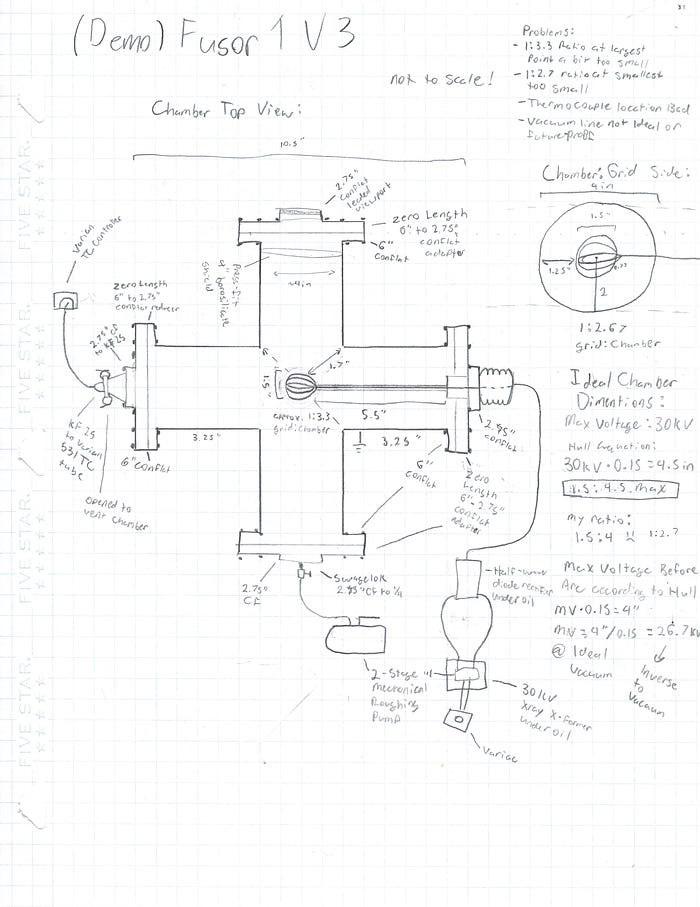
When I was doing the research for version 3, my main focus was on the vacuum system and I had not yet fully decided how the electrical system would work. The quickly drawn electrical design used the 30kV x-ray transformer that I bought from another fusor enthusiast instead of the NST, but I later realized that figuring out an entirely different power supply system while also learning how to use a new vacuum system would be ill advised. My fourth design version addressed this by switching back to the NST system while keeping everything else exactly the same.
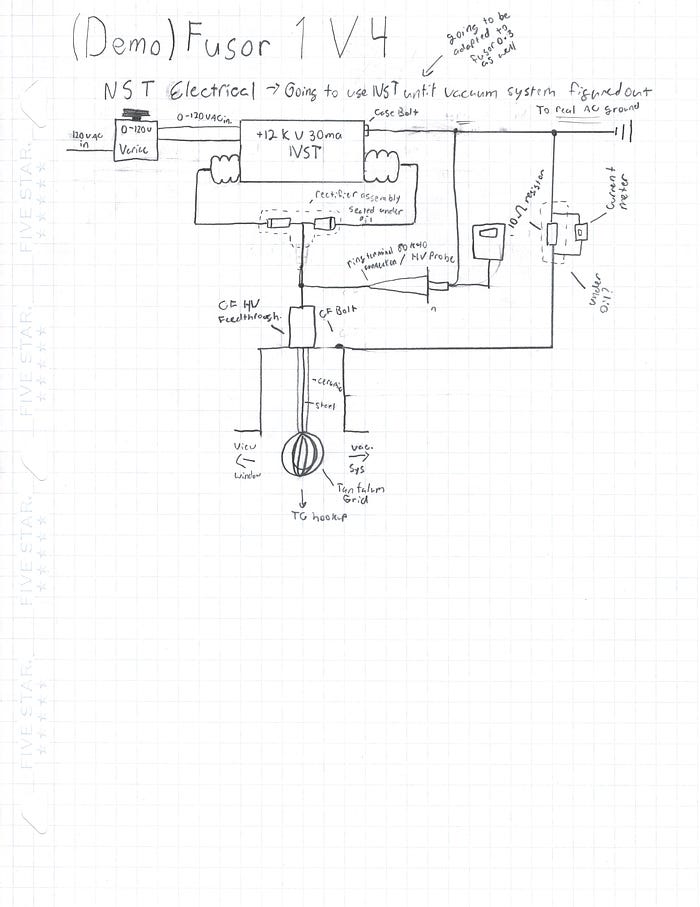
This design was based upon a “real fusion” diagram by Richard Hull²⁰, but replaces the homemade divider with a Fluke 80k-40 HV probe as I discussed in the Fusor 0 section. I moved the current resistor to be between the NST case and ground (discussed in the Fusor 0 section) for version 5, but I believe that either placement would work (and am going to test this with Fusor 0).
This is the final Fusor 1.0 design. It incorporates the NST supply from V4 (with the current metering change), and the vacuum system from V3 with a slight compromise: I removed the valve between the pump and the chamber. I did this because the type of valve that would properly interface with my pump is different from the one that I will need when I upgrade to a better mechanical pump, and then again to a diffusion pump setup. I do not want to buy an expensive valve that I won’t be able to use long into the future, so I decided to eschew the valve altogether.
The pressure in this chamber will not get nearly low enough to do fusion, as I said above, but I think that it will get notably lower than in the Fusor 0 chamber. Because the chamber itself is a specially designed, laboratory grade, high vacuum rated chamber as opposed to something I made in a day in my workshop, the only notable leaks will be in the (still PVC) vacuum line from the pump to a NPT-f inlet on the chamber. Although the pump won’t get any better, leaks will be all but eliminated, allowing the chamber to reach a slightly lower vacuum. I will measure this vacuum with my new thermocouple gauge²¹ and from there will be able to determine quantitatively how bad my vacuum pump is.
Last week I ordered all of the fittings, adapters, converters, and other parts that I had not yet acquired. I got the vast majority of these parts from LDS Vacuum Shopper, who were incredibly easy to work with and helped me get all of the components shipped to my residential address.²² I was worried that I would have to get components shipped to my high school which would have been a headache to approve with my headmaster. I may still have to, as LDS offers special perks to schools (including high schools), but only if items are shipped to a qualifying address.
The parts should arrive by mid-October at the latest, and when they do I will be able to start building Fusor 1.0. I am incredibly excited to be able to take this big step in my fusion project. Almost all of the components that I got will eventually be used for real fusion!
Planned Upgrades:
While Fusor 1.0 will be an advanced system, pushing on a “research grade” demo fusor classification,²³ and almost certainly enough to earn me admittance to fusor.net’s plasma club,²⁴ ²⁵ I will need a host of upgrades to seat myself squarely in this territory.
Firstly, and most importantly, I will need to upgrade my mechanical pump. My current pump, a cheap one found on eBay, was designed for HVAC use and is not nearly what I will need for fusion. Fusor 1.1 will replace this pump with a much higher quality mechanical pump that connects to the chamber through a properly vacuum rated tube and valve. Unfortunately, this sort of high quality pump will be less easy to obtain cheaply, although I have hope that I might find one on eBay or potentially at a university surplus sale or hamfest. Eventually, I will upgrade my vacuum setup again to include an oil diffusion pump²⁶, which will allow me to reach fusion levels of vacuum.
Once I add a diffusion pump, my next upgrade will be to replace my NST supply with one based upon the x-ray transformer that I (maybe impulsively) bought from a seller on fusor.net. This -30kV 6mA supply will be enough to achieve detectable fusion, but will require a new rectifier setup and the addition of a ballast resistor²⁷ to prevent it from destroying itself.
With the addition of a seriously high voltage supply, radiation will begin to become an issue. While I plan to write a more in depth post later when I make the upgrade, suffice it to say that I am going to need to acquire radiation detecting equipment and will have to build a shielding device (almost certainly of the shadow-cone variety) once I make this jump.
Along with these big upgrades, I have a long list of comparatively smaller, supporting upgrades such as switching to high voltage coaxial cables and connectors, adding a borosilicate sputtering shield in front of the viewport, upgrading my variac to a 0–240V one at higher amperage, adding an air admittance valve, and many more. While equally important, they won’t effect the fundamental operation or capabilities of Fusor 1 to nearly the same level as the larger ones that I mentioned.
New Workspace and other Long-Term Upgrades:
Lab 1:
These upgrades — along with the rest of Fusor 1 — will take up a lot of space (both to build and operate). My current workshop is not ideal in that regard, as it was intended for storage before I commandeered it and is very cramped. Additionally, my workspace does not have adequate, or safe access to power. Electricity is currently supplied via an extension cord and splitter, which at this point is just tempting Murphy’s law.

Both the construction and operation of Fusor 1 will require a much more carefully thought out, rigorous, and scientific approach — and for that a new workspace is all but required. Luckily, my family moved somewhat recently and we still have some empty, unused space that I can move my workshop into. My dad has agreed to let me turn the empty attic into a dedicated space for a rudimentary fusion lab, called Lab 1, that I will use for Fusor 1.

Turning this mostly empty space into a fully featured high voltage workshop will be a project in and of itself, as everything from tables and workbenches, to proper electrical wiring (and grounding), to ventilation, will have to be done before I can use the space for fusion work. As Fusor 1 is an ever-changing project, I will need a highly configurable workspace conducive to both rapid prototyping and assembly, as well as to scientifically rigorous(ish) fusor operation. To that end, I will design and build Lab 1 in parallel with Fusor 1’s construction so that I do not end up locked into any sub-optimal workshop design.
Ancillary to the physical setup of Lab 1 in terms of Fusor 1 (which will be able to be powered from a single standard wall outlet) is the electrical wiring of the new workshop. As this attic will end up being used for non-fusor purposes (I believe it will be converted into a guest room) after I leave for college, my parents want all wiring to be done by a real electrician (probably a good idea) and have veto-ed some of my wilder ideas about how the space could be used. Limitations aside, my ideal lab will (by necessity) have separate “stations” for the fusor chamber, vacuum systems, HV power supply, monitoring systems, and a radiation shielded operator area. Ideally, it will also be wired with separately isolated mains supplies (and grounds) to avoid electrical interference, although I could run all sensitive monitoring equipment on batteries (with lots of power conversion) to avoid the problem altogether.
As this new space is very much in it’s conceptual stages, it is unlikely that it will be operational any time soon. I will likely set up a few tables and sufficient electrical supply for Fusor 1.0 and then upgrade the workspace as I upgrade the device moving forward.
Advanced Control Panel:
Fusor 0 is a very simple, “analog” device in that it has one variable input, the voltage supplied to the NST, that is controlled by an analog dial that I have to turn. While this will be the case for early versions of Fusor 1 as well, eventually I would like everything to be controllable with micro-controllers. As I add more methods of variable input (deuterium injection being the main one, but also voltage and current limiting devices, valves, etc.) and the operating procedure becomes more complex, such a system will not only be incredibly useful safety wise (automated shutdown, alarms, etc.) but will allow me to isolate variables for experimentation.
With all of the added complexity that I am envisioning, I need to be careful to consider Occam’s principle of parsimony²⁸ that “entities should not be multiplied beyond necessity.” In Elon Musk’s brilliant restating³⁰ of this universal principle²⁹ ³¹, I need to make my requirements “less dumb.” To expand on that, Elon enumerates five steps to the design process:
- Make the requirements less dumb
- Delete parts of the process
- Simplify or optimize
- Accelerate cycle time
- Automate
With that in mind, I am going to start designing a Raspberry Pi based control system that activates different components through a relay board. This will also let me easily incorporate both safety systems and comprehensive data collection quite easily. While an Arduino could do the same thing and is technically the better choice for this sort of low-level automation, I know Python much better than I know C++ so I will be able to implement my ideas more easily with Python on a Raspberry Pi instead of the C++ Arduino micro-controller.
As I said, Fusor 1.0 will not have this system as it is not strictly necessary for operation. The added benefit of such a system, as well as the fact that I will need it for fusion, makes me want to have a simple version operable by Fusor 1.2 or 1.3 at the latest.
This post ended up being significantly longer than I expected, but a lot of progress has occurred. I still have some exploration to do with Fusor 0 as well, so my project is unilaterally speeding up. With Fusor 0 fully functional and Fusor 1.0 very close to being built, I am quickly approaching a major milestone in my fusor project. Hopefully that milestone will not only be self-declared but substantiated with a plasma club title as well. I am very excited for what the future holds!
Notes & Citations:
¹ https://en.wikipedia.org/wiki/Sputter_deposition
² https://www.fusor.net/board/viewtopic.php?f=30&t=5041
³ https://www.fluke.com/en-us/product/accessories/probes/fluke-80k-40
⁴ https://en.wikipedia.org/wiki/Test_probe#High-voltage_probes
⁵ https://www.fusor.net/board/viewtopic.php?f=29&t=4267
⁶ https://www.fusor.net/board/viewtopic.php?f=29&t=8840
⁷ https://en.wikipedia.org/wiki/Test_probe#Sampling_resistor
⁸ https://www.fusor.net/board/viewtopic.php?f=29&t=4266
⁹ https://www.fusor.net/board/viewtopic.php?f=29&t=9968 Note: This article describes a much more “heavy duty” grounding system designed for real fusors, but the central design philosophy is the same.
¹⁰ https://www.analog.com/en/analog-dialogue/articles/staying-well-grounded.html
¹¹ Upon reflection, it is rather concerning that “no catastrophic failures” is my definition of success.
¹² https://www.sparkfun.com/products/12966
¹³ https://www.fluke.com/en-us/product/electrical-testing/digital-multimeters/fluke-117
¹⁴ It’s ironic that this specific Fluke replaced this specific Sparkfun as 8 years ago Fluke got Sparkfun in legal trouble over the visual similarities between the two meters: https://www.sparkfun.com/news/1428. I recognize that this tidbit is the peak of nerdy minutia, but I thought it was mildly interesting.
¹⁵ https://www.fusor.net/board/viewtopic.php?f=29&t=8710
¹⁶ https://www.fusor.net/board/viewtopic.php?f=29&t=10333
¹⁷ https://www.fusor.net/board/viewtopic.php?f=24&t=2795
¹⁸ https://www.fusor.net/board/viewtopic.php?f=25&t=12616
¹⁹ https://www.fusor.net/board/viewtopic.php?f=29&t=4883
²⁰ https://www.fusor.net/board/viewtopic.php?f=29&t=4406
²¹ https://www.fusor.net/board/viewtopic.php?f=25&t=3592
²² Although nothing I ordered was hazardous or otherwise controlled such that it could not be shipped, there are sometimes additional costs for shipping laboratory grade equipment to a residential address.
²³ https://www.fusor.net/board/viewtopic.php?f=24&t=2674
²⁴ https://fusor.net/board/viewtopic.php?t=13&f=7&sid=c03634687c8297889a4d61478c773b2d#p512
²⁵ A minimum of plasma club admittance will be needed to claim any sort of (very minimal) credibility when discussing fusion. Ideally, I will have been admitted to the much more selective and prestigious neutron club by the time that I am applying to colleges, as a substantiated claim of fusion will hopefully go a long way in that context.
²⁶ https://www.fusor.net/board/viewtopic.php?f=25&t=4142
²⁷ https://www.fusor.net/board/viewtopic.php?f=29&t=9383
²⁸ https://en.wikipedia.org/wiki/Occam%27s_razor
²⁹ https://www.youtube.com/watch?v=t705r8ICkRw
³⁰ For the record, this is sarcasm.
³¹ https://insideevs.com/news/526954/elon-musk-5-steps-success/
